Afgangsprojekt fra studiet til civilingeniør
i Design af Mekaniske Systemer, fra Aalborg Universitet.
Afgangsprojektet har jeg lavet sammen med to af mine gode venner
Henrik og Martin, for firmaet Thorup Smed A/S.
Projektet omhandler design og konstruktion af en robot til håndtering
af emner på mindre end 30 kg i en afstand på 2,6 m.
Den tænkes især brugt indenfor træindustrien til håndtering
af europapaller.
Udgangspunktet var at lave en billig kvalitetsrobot, som kan konkurrere
mod andre automatiske palleteringsanlæg. Virksomheden Thorup Smed
A/S stillede opgaven og medfinancerede robotten.
Projektet indebar fastlæggelse af en typisk arbejdscyklus inklusive
path-generering, dynamisk simulering af 3D-mekanismen, design
af den mekaniske del inklusive teknisk dokumentation, dimensionering
af servomotorer og servodrives samt implementering af styringen.
AVI-klip af håndteringsrobotten
optaget i foråret 2004
Klip
1 (6,7 MB) | Klip
2 (5,8 MB) | Klip
3 (5,8 MB) |
Tekniske specifikationer:
Lasteevne 30 kg
Motorstyrede akser 4 stk. (Rexroth servomotorer)
Egenvægt eks. motor og gear 290 kg
Hastigheder ved maks. last (ca. værdier)
Krøjning af robot 120 Grad/s
Vertikal bevægelse af gribeværktøj 2 m/s
Horisontal bevægelse af gribeværktøj 2 m/s
Rotation af gribeværktøj 150 Grad/s
Accelerationer ved maks. last (ca. værdier)
Krøjning af robot 320 Grad/s2
Vertikal bevægelse af gribeværktøj 3,8 m/s2
Horisontal bevægelse af gribeværktøj 3,8 m/s2
Rotation af gribeværktøj 350 Grad/s2
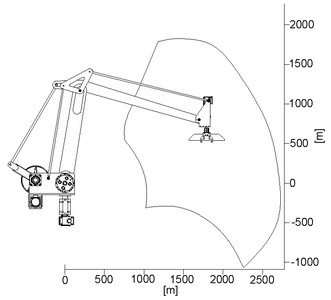
Arbejdsrum: